
Trong thời đại công nghệ phát triển, những mô hình thùng rác thông minh đang trở thành xu hướng mới trong việc xây dựng không gian sống hiện đại, sạch sẽ và tiện nghi. Không chỉ dừng lại ở sản phẩm thương mại sẵn có, ngày càng có nhiều người tự tìm hiểu cách chế tạo thùng rác thông minh tại nhà để phục vụ học tập, nghiên cứu hoặc làm dự án STEM.
Bài viết này sẽ chia sẻ ý tưởng thiết kế, nguyên lý hoạt động và hướng dẫn chế tạo thùng rác thông minh đơn giản nhất – giúp bạn dễ dàng tự làm một sản phẩm tự động, vừa tiết kiệm chi phí, vừa mang tính ứng dụng cao.
Ý tưởng mô hình thùng rác thông minh
Trước khi bắt tay vào chế tạo, điều quan trọng là phải hiểu ý tưởng thiết kế của thùng rác thông minh – loại sản phẩm ứng dụng cảm biến và điều khiển tự động nhằm thay đổi thói quen vứt rác truyền thống.
Mô hình này được xây dựng dựa trên nguyên tắc “nhận diện – phản hồi – tự động hóa”: khi cảm biến phát hiện người hoặc vật thể trong khoảng cách định sẵn, hệ thống sẽ kích hoạt động cơ mở nắp thùng mà không cần chạm tay. Sau một khoảng thời gian ngắn, nắp sẽ tự động đóng lại, giúp tiết kiệm năng lượng và giữ vệ sinh hiệu quả.
Từ ý tưởng cơ bản đó, có thể phát triển thêm nhiều hướng sáng tạo khác nhau:
- Thùng rác phân loại tự động: kết hợp cảm biến màu hoặc trọng lượng để phân biệt rác hữu cơ – vô cơ.
- Thùng rác IoT: sử dụng module Wi-Fi (ESP8266/ESP32) gửi dữ liệu về lượng rác đến điện thoại hoặc trung tâm quản lý.
- Thùng rác thông minh khử mùi: tích hợp quạt hút mini, than hoạt tính hoặc đèn UV diệt khuẩn.
- Thùng rác năng lượng mặt trời: tận dụng pin năng lượng để cấp điện cho cảm biến và động cơ, thân thiện môi trường.
Nhờ tính linh hoạt và khả năng mở rộng cao, mô hình thùng rác thông minh không chỉ mang lại tiện ích cho gia đình mà còn là ý tưởng học tập sáng tạo trong các cuộc thi khoa học kỹ thuật, dự án STEM hay nghiên cứu IoT thực hành.

Nguyên liệu để làm mô hình thùng rác thông minh
Để tự chế tạo một mô hình thùng rác thông minh, bạn chỉ cần chuẩn bị một số linh kiện điện tử và vật liệu cơ bản. Các thành phần này dễ tìm và phù hợp cho cả học sinh, sinh viên hoặc người mới bắt đầu học Arduino.
Danh sách nguyên liệu cần thiết:
- Thùng rác nhựa dạng đạp chân hoặc nắp bật: dùng làm khung chính để gắn cảm biến và động cơ.
- Bo mạch Arduino Uno hoặc Nano: đóng vai trò điều khiển trung tâm, xử lý tín hiệu từ cảm biến.
- Cảm biến siêu âm HC-SR04 hoặc SRF05: phát hiện khoảng cách khi có người hoặc vật thể đến gần.
- Động cơ Servo SG90 mini: dùng để đóng mở nắp thùng rác tự động.
- Dây nối jumper và breadboard nhỏ: hỗ trợ kết nối các linh kiện với nhau.
- Súng bắn keo và keo nến: cố định linh kiện vào thân thùng rác.
- Nguồn điện 5V hoặc pin sạc dự phòng: cung cấp năng lượng cho toàn bộ hệ thống.
Với những nguyên liệu cơ bản này, bạn đã có thể sẵn sàng bắt đầu thiết kế và lắp ráp mô hình thùng rác thông minh hoạt động hoàn toàn tự động và thân thiện với người dùng.

Cách chế tạo mô hình thùng rác thông minh
Sau khi chuẩn bị đầy đủ các linh kiện, bạn có thể bắt đầu lắp ráp mô hình thùng rác thông minh theo các bước đơn giản dưới đây. Cách làm này dễ thực hiện, phù hợp cả với người mới bắt đầu học về điện tử và lập trình.
( lấy ảnh ghi Nguồn: BanLinhKien.Vn)
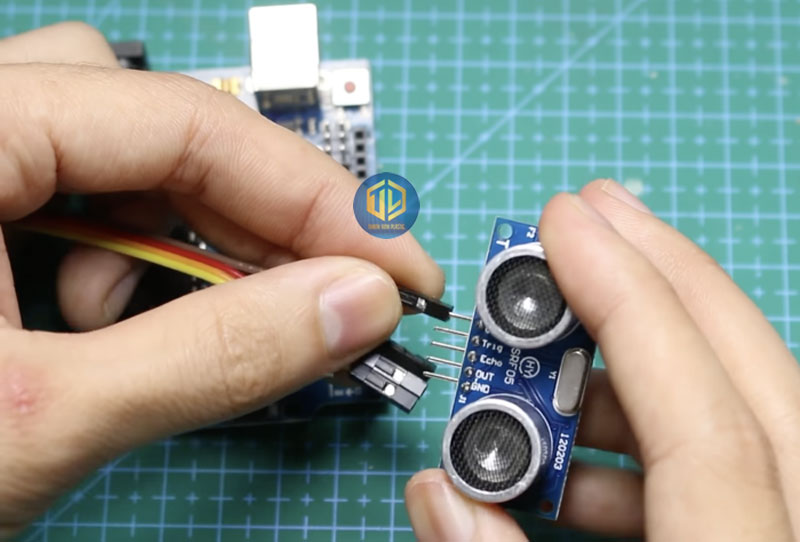
Bước 1: Kết nối cảm biến siêu âm với Arduino
Cảm biến có 5 chân, dùng 4 chân: VCC, Trig, Echo, GND (bỏ cổng OUT).
Kết nối:
VCC → 5V
Trig → D13
Echo → D12
GND → GND
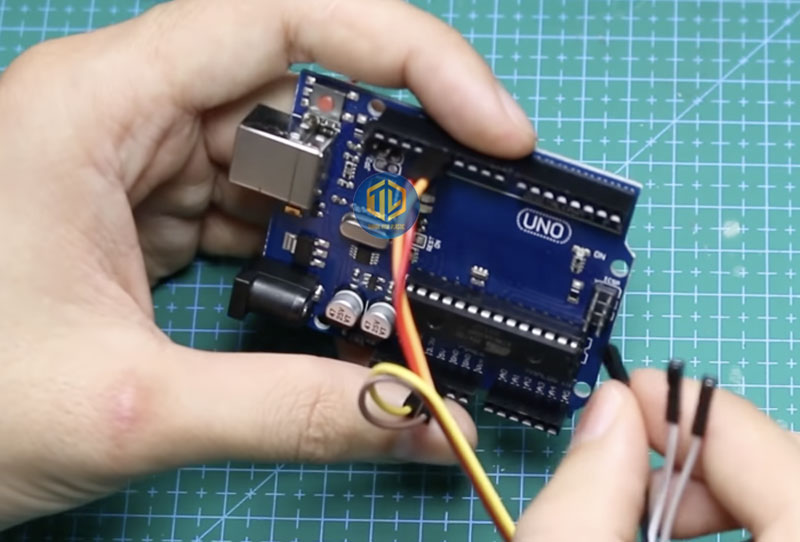
Bước 2: Kết nối động cơ Servo SG90
Do Arduino thiếu cổng 5V, hãy cắm Servo vào cổng ICSP gồm GND, MOSI và VCC.
Chân tín hiệu Servo nối với chân D11 hoặc MOSI.
Bước 3: Nạp chương trình điều khiển (code mẫu)
#include <DistanceSRF04.h>
#include <Servo.h>
DistanceSRF04 Dist;
Servo myservo;
#define GOC_DONG 0 //Đây là góc đóng của servo
#define GOC_MO 110 //Đây là góc mở của servo
int distance;
unsigned long previousMillis = 0;
unsigned char autoTrigger = 0;
unsigned long autoMillis = 0;
void setup()
{
Serial.begin(9600);
//echo, trigger
Dist.begin(12, 13);
//servo
myservo.attach(11);
myservo.write(GOC_DONG);
}
void loop()
{ // Phần previousMillis >= 100 đây chính là thời gian lấy mẫu của cảm biến siêu âm 100ms
if (millis() – previousMillis >= 100) {
previousMillis = millis();
distance = Dist.getDistanceCentimeter();
Serial.print(“\nDistance in centimers: “);
Serial.print(distance);
// Phần distance < 10 đây là phần cài đặt khoảng cách cảm biến nhận được kích hoạt mở thùng rác
if (distance < 10) {
autoTrigger = 1;
autoMillis = millis();
myservo.write(GOC_MO);
}
}
// Phần autoMillis >= 2000 đây sẽ là thời gian tự động đóng thùng rác sau 2s
if (millis() – autoMillis >= 2000 && autoTrigger == 1) {
autoTrigger = 0;
myservo.write(GOC_DONG);
}
}
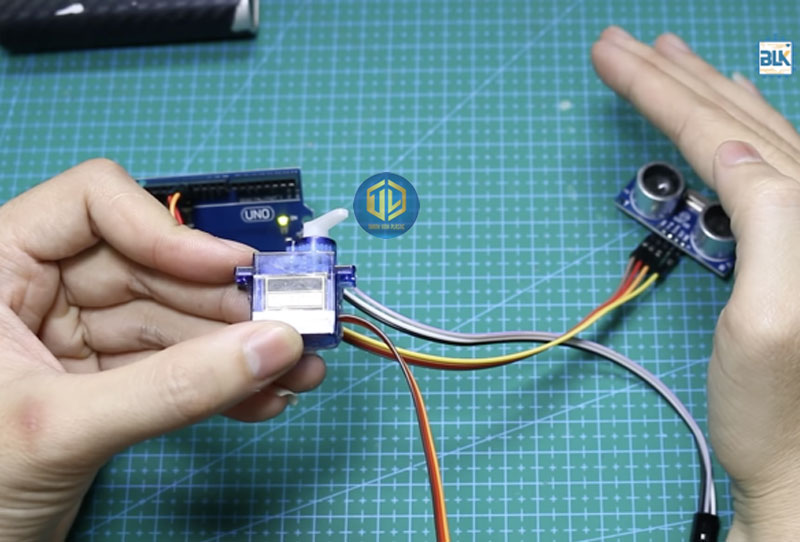
Bước 4: Kiểm tra cảm biến và Servo đã hoạt động đúng chưa.
Bước 5: Gắn Servo gần trục nắp thùng để nó có thể kéo – đẩy nắp.

Bước 6: Cố định cảm biến siêu âm ở mặt trước thùng, giúp phát hiện chuyển động tay.

Bước 7: Lắp Arduino vào phần đáy, đi dây gọn gàng.

Bước 8: Nối nguồn 5V hoặc pin sạc dự phòng để cung cấp điện.
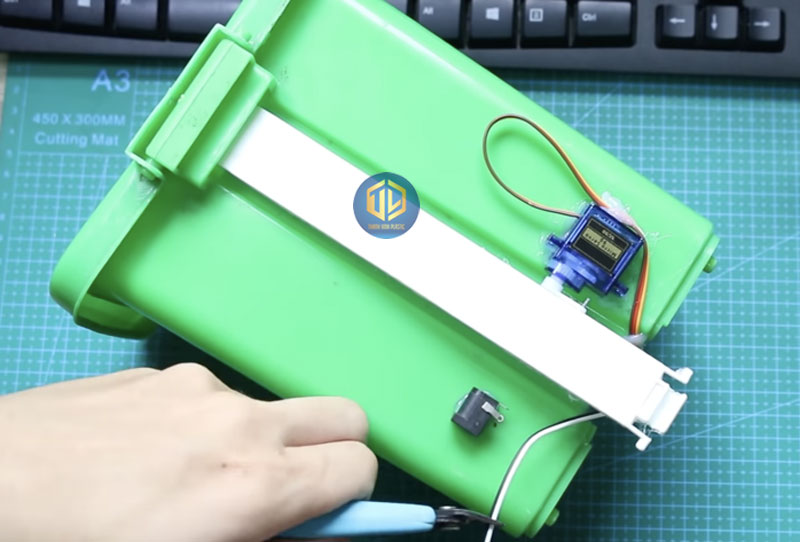
Bước 9: Gắn lại nắp thùng, cố định keo chắc chắn.

Bước 10: Kiểm tra vận hành — khi đưa tay lại gần cảm biến, nắp thùng tự mở; sau khoảng 2 giây, nắp tự đóng.


Hy vọng qua bài viết này, bạn đã có thêm ý tưởng và hướng dẫn chi tiết để tự tay chế tạo cho mình một mô hình thùng rác thông minh – vừa tiết kiệm chi phí, vừa thể hiện khả năng sáng tạo và góp phần bảo vệ môi trường sống xanh – sạch – đẹp.




